|
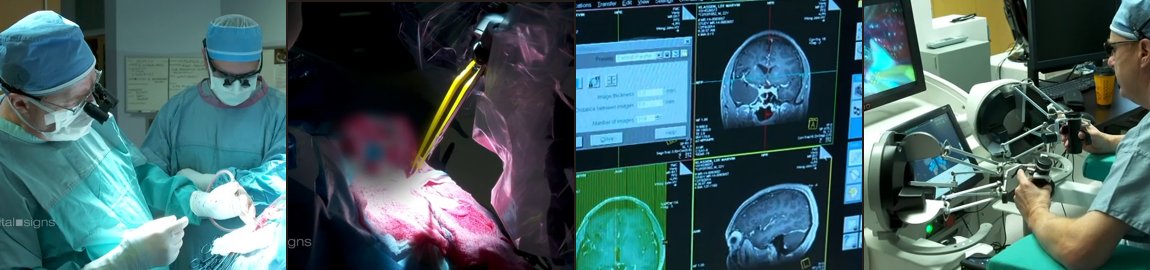
Neurosurgery Dr. Garnette Sutherland and his team at the University of Calgary, together with engineers at Macdonald Dettwiler and Associates (MDA), have worked together to create the world’s first MRI-compatible, image-guided, computer-assisted robotic device specifically designed for neurosurgery. The tele-operated surgical robot, neuroArm, provides tremor filtering and motion scaling capabilities to enhance the surgeon’s precision during microsurgery, and allows the surgeon to operate inside the bore of a magnetic resonance scanner while images are continuously acquired. With the introduction of such a technology, there is a need for surgeons, both new and experienced, to educate themselves and train to proficiency before they can safely perform a procedure. Because training time and extended practice sessions on the robotic device itself are costly and can be difficult to schedule, immersive virtual-reality-based simulations may prove to be the most effective training solution. |
The Virtual Touch Lab and the neuroArm team at the University of Calgary are working together to design and develop, using the CHAI3D libraries, a suite of VR simulations for neurosurgical training, planning, and rehearsal. Developing a simulation for robotic neurosurgery offers a unique advantage: the virtual environment can be designed to use the same master console and interface the surgeon would otherwise use to operate the surgical robot. This eliminates the need to design a haptic interface that mimics the feel of a microsurgical instrument—an often difficult task—as well as the concern of transferring incorrect motor skills. Borrowing from aviation terminology, it's akin to learning to fly in a perfect replica of the cockpit of the aircraft. The ability of the simulations to incorporate pre-operative medical image data, in the form of CT and MR scans, provides an additional opportunity for the surgeon to practice on a virtual model of the patient’s specific anatomy and pathology before performing the procedure in the operating room. The surgeon can safely experiment with different surgical approaches to develop an optimal plan for conducting a specific patient’s operation with the neurosurgical robot. These capabilities have a strong potential to revolutionize the quality of surgical care. Reference |